CMUcam5 Pixy




รายละเอียดสินค้า
เซนเซอร์ CMUcam5 Pixy เพื่อให้เครื่องบินติดตามเป้าหมายหรือสีวัตถุ
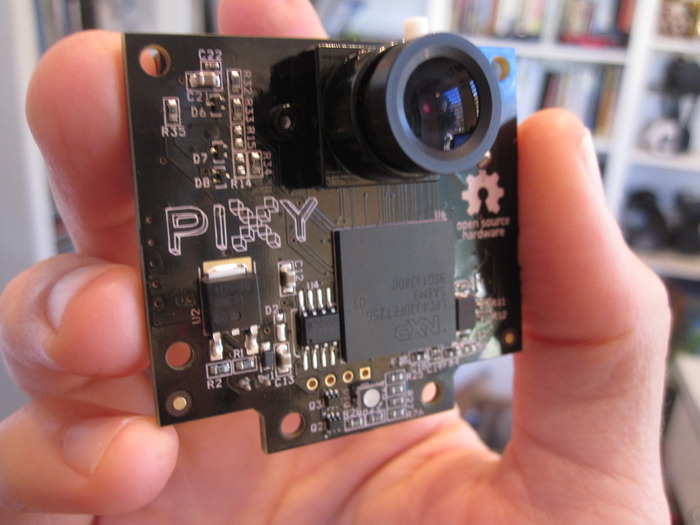
Introducing Pixy¶
- Small, fast, easy-to-use, low-cost, readily-available vision system
- Learns to detect objects that you teach it
- Outputs what it detects 50 times per second
- Connects to Arduino with included cable. Also works with Raspberry Pi, BeagleBone and similar controllers
- All libraries for Arduino, Raspberry Pi, etc. are provided
- C/C++ and Python are supported
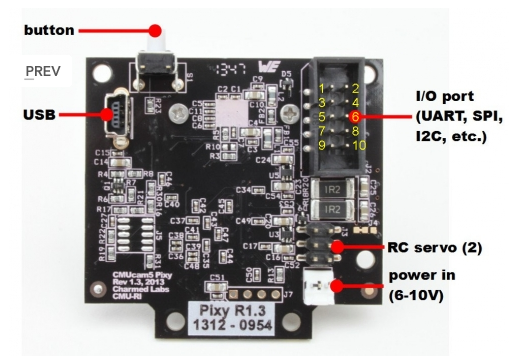
- Communicates via one of several interfaces: SPI, I2C, UART, USB or analog/digital output
- Configuration utility runs on Windows, MacOS and Linux
- All software/firmare is open-source GNU-licensed
- All hardware documentation including schematics, bill of materials, PCB layout, etc. are provided
CMUcam5 Pixy - Technical specs
- Processor: NXP LPC4330, 204 MHz, dual core
- Image sensor: Omnivision OV9715, 1/4", 1280x800
- Lens field-of-view: 75 degrees horizontal, 47 degrees vertical
- Lens type: standard M12 (several different types available)
- Power consumption: 140 mA typical
- Power input: USB input (5V) or unregulated input (6V to 10V)
- RAM: 264K bytes
- Flash: 1M bytes
- Available data outputs: UART serial, SPI, I2C, USB, digital, analog
- Dimensions: 2.1" x 2.0" x 1.4
- Weight: 27 grams
เป็นโมดูลกล้องตรวจจับแยกแยะวัตถุด้วยสีที่โด่งดังและประสบความสำเร็จอย่างสูงในการระดมทุนผ่าน www.kickstarter.com โดยใช้โมดูล CCD ทำงานร่วมกับแผงวงจรประมวลผลภาพหรือ image processing โดย Pixy นับเป็นรุ่นที่ 5 ของโครงการ CMUCAM บางครั้งจึงเรียก Pixy ว่า CMUCAM5 มีคุณสมบัติทางเทคนิคที่สำคัญดังนี้
- หน่วยประมวลผล : ARM 32 บิต 2 แกน (dual core) เบอร์ LPC4330 ความเร็ว 204MHz
- ตัวตรวจจับข้อมูลภาพ : Omnivision OV9715, 1/4 นิ้ว ความละเอียด 1280 x 800 พิกเซล
- มุมการรับภาพของเลนส์ (Lens field-of-view) : 75 องศาในแนวนอน และ 47 องศาในแนวตั้ง
- ชนิดของเลนส์ : standard M12
- ความเร็วในการตรวจจับภาพ : 50 เฟรมต่อวินาที
- ตรวจจับสีที่ต้องการได้พร้อมกัน 7 สี และแยกแยะวัตถุได้ 100 ชิ้น
- ความต้องการกระแสไฟฟ้า : 140mA
- ไฟเลี้ยง : +5V จากจุดต่อพอร์ต USB หรือ +6 ถึง +10V ผ่านจุดต่อไฟเลี้ยง
- หน่วยความจำแรม : 264 กิโลไบต์
- หน่วยความจำแฟลช : 1 เมกะไบต์
- ขับเซอร์โวมอเตอร์ได้ 2 ตัว เพื่อใช้ในการหมุนตัวกล้องทั้งในแนวนอน (pan) และแนวตั้ง (tilt)
- การเชื่อมต่อกับไมโครคอนโทรลเลอร์หรือบอร์ดสมองกลฝังตัว : ผ่านพอร์ต UART, บัส SPI, บัส I2C, พอร์ตดิจิตอล และพอร์ตอะนาลอก
- เชื่อมต่อกับบอร์ดไมโครคอนโทรลเลอร์ได้ทั้ง Arduino, IPST-SE, Unicon และบอร์ดไมโครคอนโทรลเลอร์ 32 บิต ARM ที่มีพอร์ต SPI
- เชื่อมต่อคอมพิวเตอร์ผ่านพอร์ต USB เพื่อแสดงผลภาพและตั้งค่า โดยทำงานร่วมกับซอฟต์แวร์ PixyMon ดาวน์โหลด
- ที่ http://cmucam.org/projects/cmucam5/files
- ขนาด : 2.1 x 2.0 x 1.4 นิ้ว
- น้ำหนัก : 27 กรัม
- ข้อมูลเพิ่มเติม http://www.cmucam.org/projects/cmucam5/wiki/Wiki
วิธีการชำระเงิน
ร้านค้านี้ยังไม่ได้กำหนดวิธีการชำระเงินค่ะ กรุณา ติดต่อกับทางร้าน เกี่ยวกับรายละเอียดในการชำระเงิน
โทรหาก่อนโอนเงินครับ ทินกร T. 086-054-0582
หรือ แจ้งข้อความทาง Line id tinnakonza
หรือ แจ้งข้อความทาง Facebook https://www.facebook.com/tinnakonza
จ่ายบิทคอยน์สกุลเงินดิจิทัล
BTC - bc1qxhmdufsvnuaaaer4ynz88fspdsxq2h9e9cfrtyt
ETH-erc20 - 0xaB6B4b11378a57933333e4Acfdc45567Dd78ddfrer
กระเป๋า SOL = 9AV2cujwKdcUkskv9Vg4vrWT2vfNxRrMTN5fV1FvyiSk
ชำระเงินผ่านธนาคาร
ชำระเงินออนไลน์
- ค่าธรรมเนียม 7% + 100 THB
- การชำระผ่าน PayPal คุณไม่จำเป็นต้องแจ้งชำระเงิน เนื่องจากระบบจะจัดการให้คุณทันที ที่คุณชำระเงินเสร็จสมบูรณ์












สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
➜ เลือกซื้อสินค้าเพิ่ม