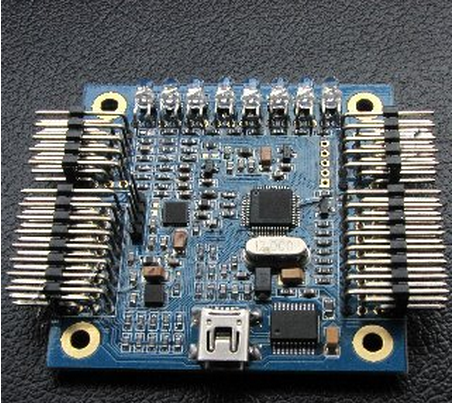
ชื่อบอร์ดควบคุมข่ายต่าง ๆ บอร์ด Multicopter/FPV Controller Board
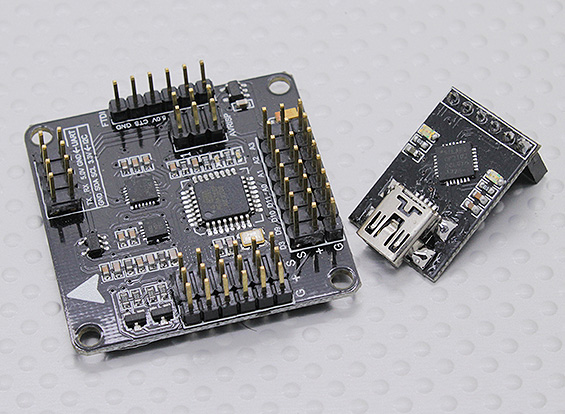
-Multiwii SE 2.5
• ATMega 328P Microcontroller
• MPU6050C 6 axis gyro/accel with Motion Processing Unit
• HMC5883L 3-axis digital magnetometer
• BMP085 digital pressure sensor
• PCA9306DP1 logic level converter

-Multiwii Lite
· ATMEGA328P microcontroller
· ITG3205 three-axis digital gyroscope
· ADXL345 three-axis acceleration sensor

-Multiwii Mini Flight Controller
• ITG3205 Triple Axis Gyro
• BMA180 Accelerometer
• ATMega 328P-AU Microcontroller
-MultiWii MicroWii ATmega32U4
• ATmega32U4 based with Leonardo Bootloader
• 10DOF sensor array
• MPU-6050 (GYRO/ACC)
• HMC-5883L (MAG)
• MS5611-01BA03 (BARO)
-MultiWii NanoWii ATmega32U4 Micro Flight Controller
• Based on Atmega32u4
• Invensense MPU6050 6 axis gyro and accelerometer (supports auto-level)
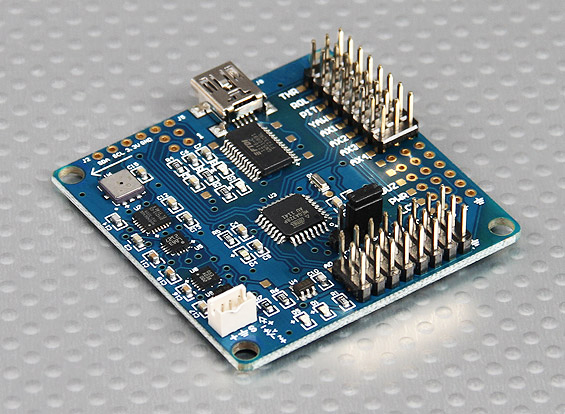
-MultiWii 328P Flight Controller w/FTDI & DSM2
• SMD component design with Atmega328P
• ITG3205 Triple Axis Gyro
• BMA180 Accelerometer
• BMP085 Barometer
• HMC5883L Magnetometer
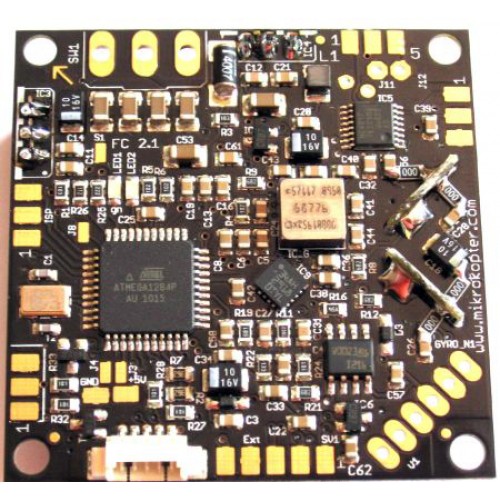
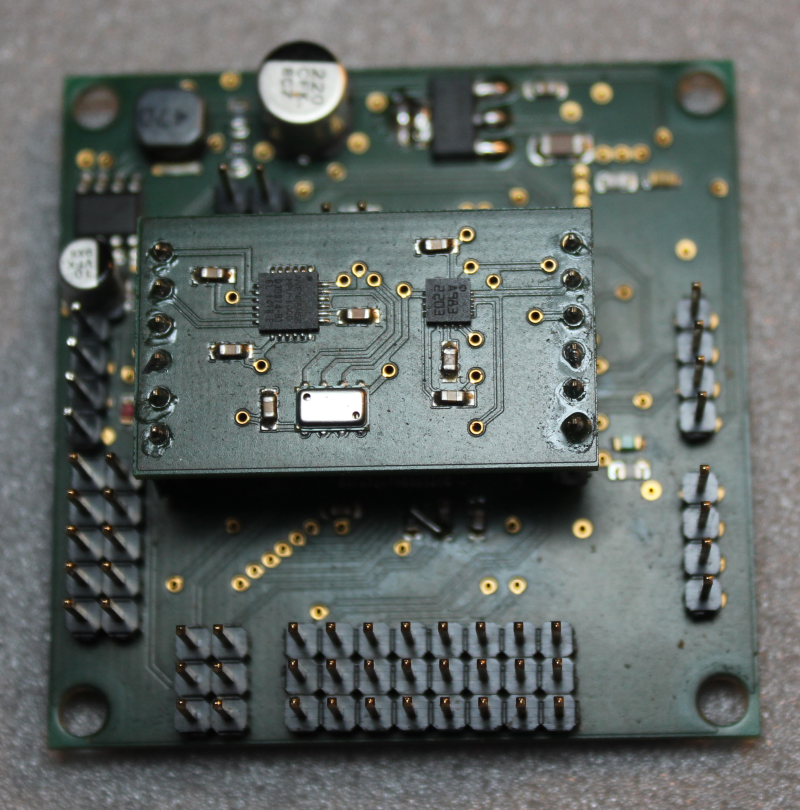
-Flight-Ctrl V2.1 ME Mikrokopter
• 1 pressure sensor MPX4115Ais
• 1 SMD-preassembled board (acceleration sensor is mounted)
• 3 MEMS-Gyroskope (assembled)
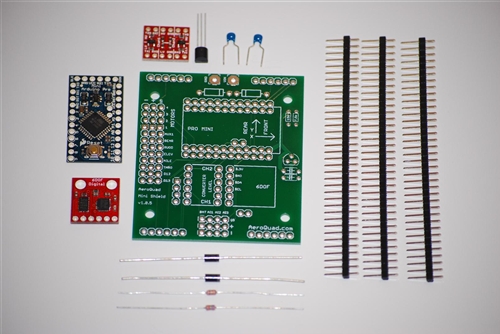
-AeroQuad Mini v1.0 Kit
• Arduino Pro Mini
• SparkFun 6DOF Sensor Board
ITG3200 gyro and the ADXL345 accelerometer
-Hobbyking i86L Multi-Rotor Control Board
Atmel Mega168PA 8-Bit
3-axis MEMS gyro
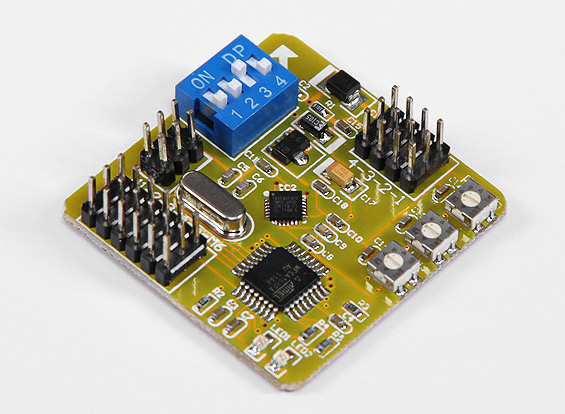
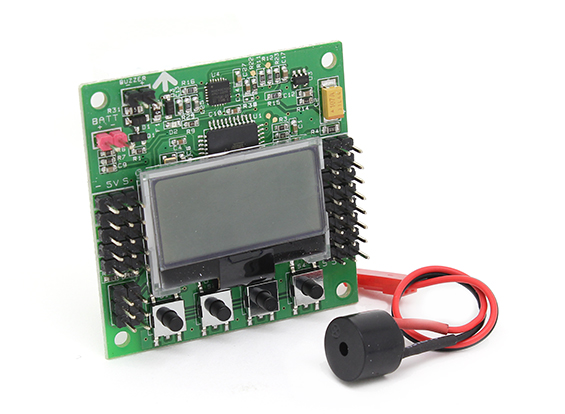
-Hobbyking KK2.1.5 Multi-rotor LCD Flight Control
IC: Atmega644 PA
Gyro/Acc: 6050MPU InvenSense Inc.
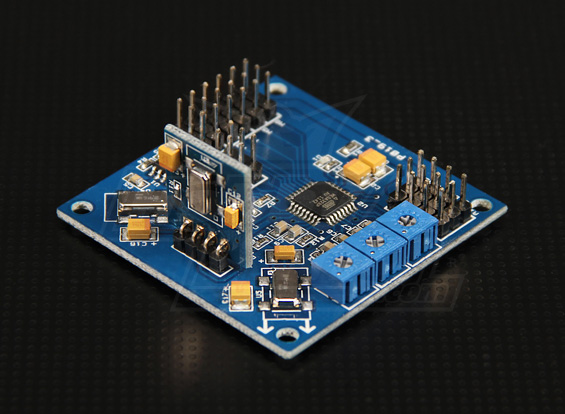
-HobbyKing Multi-Rotor Control Board V3.0
IC: Atmega328 PA
Gyro: Murata Piezo
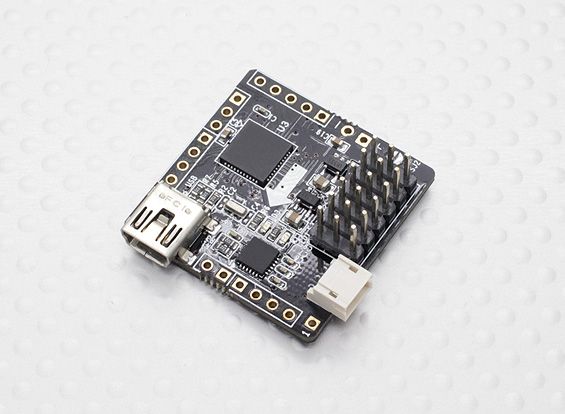
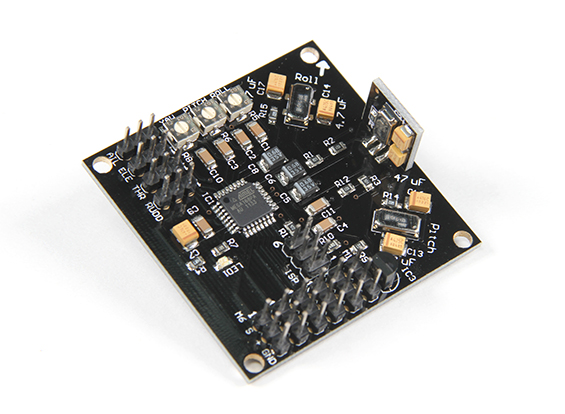
-MINI MWC Flight Control Board and DSM2 Compatible Receiver
• ATMEGA328P Microcontroller
• MPU6050 Accelerometer and Gyro
• BMP085 Digital Barometric Sensor
• HMC5883L Digital Manometer/Compass
• C8051F330 MCU
• CYRF69103 Radio
-GT Power4 Axis, 6 Axis Quad-Multlcopter Board S1
Atmel Mega168PA 8-Bit
Gyro scale: +/- 500dps, ODR: 800hz

-KK Multicopter V5.5 Flight Controller
(Atmega168)
Setting Gyro gain
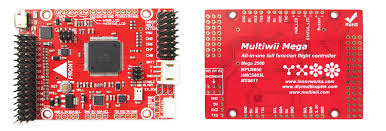
-MultiWii Mega
﹡CPU: ATmega2560
﹡Acc+Gyro: MPU6050 (a real progress for having a perfect stabilization)
﹡Mag: HMC5883L (for “Heading hold”, “Carefree” and GPS functions)
﹡Baro: MS5611-01BA01 (for “ALT Hold”, greater precision than BMP085 )
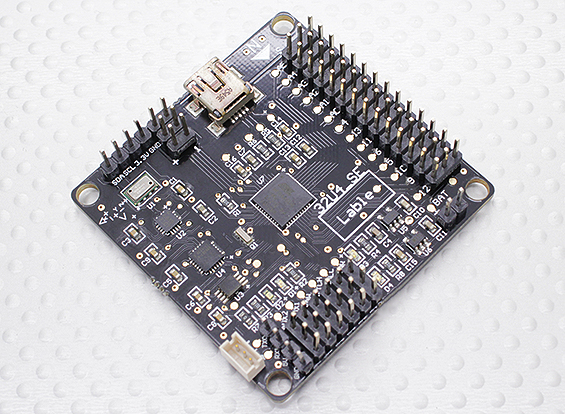
-MutiWii Pro
• SMD component design with Atmega2560
• ITG3205 Triple Axis Gyro
• BMA180 Accelerometer
• BMP085 Barometer
• HMC5883L Magnetometer
-Multiwii and Megapirate AIO V2.0 Flight Controller w/FTDI (ATmega 2560)
• ATMega 2560 Microcontroller
• MPU6050 6 axis gyro/accel with Motion Processing Unit
• HMC5883L 3-axis digital magnetometer
• MS5611-01BA01 highprecision altimeter

-HobbyKing HKPilot Mega Mini Flight Controller
• Honeywell HMC5883L-TR Digital compass
• Invensense's 6 DoF Accelerometer/Gyro MPU-6000
• Measurement Specialties MS5611-01BA03 Barometric pressure sensor.
• Atmel ATMEGA2560 and ATMEGA32U-2 (processing and USB function).
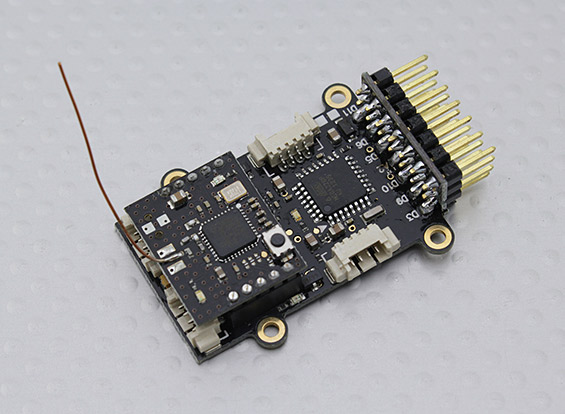
-Micro HKPilot Mega Micro Sized Flight Controller
• Honeywell HMC5883L-TR Digital compass
• Invensense's 6 DoF Accelerometer/Gyro MPU-6000
• Measurement Specialties MS5611-01BA03 Barometric pressure sensor.
• Atmel ATMEGA2560 and ATMEGA32U-2 (processing and USB function).
-3DR APM2.6 ArduPilot Mega 2.6
Invensense's 6 DoF Accelerometer/Gyro MPU-6000.
Barometric pressure sensor upgraded to MS5611-01BA03, from Measurement Specialties.
Atmel's ATMEGA2560 and ATMEGA32U-2 chips for processing and usb functions respectively.
-ArduPilot Mega 2.5.2
- Invensense's 6 DoF Accelerometer/Gyro MPU-6000.
- Barometric pressure sensor upgraded to MS5611-01BA03,
- Atmel's ATMEGA2560 and ATMEGA32U-2 chips
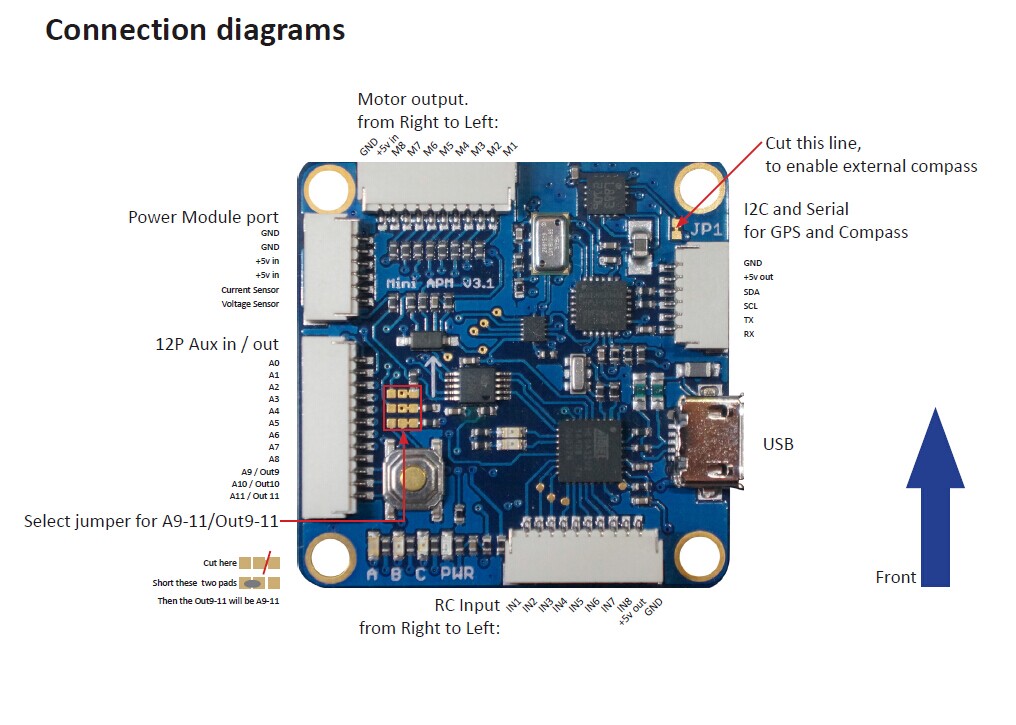
-Mini APM V3.1 ArduPilot Mega
- Invensense's 6 DoF Accelerometer/Gyro MPU-6000.
- Barometric pressure sensor upgraded to MS5611-01BA03,
- Atmel's ATMEGA2560 and ATMEGA32U-2 chips
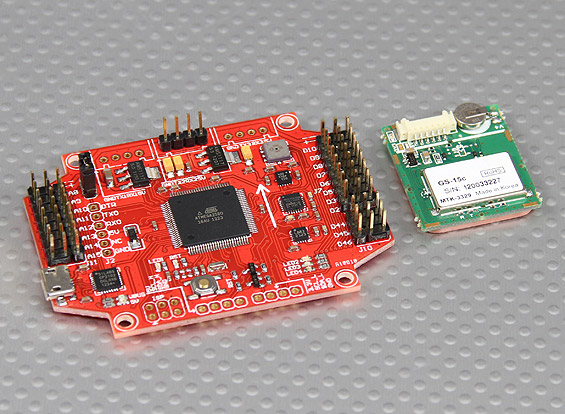
-Mini APM V3.1 Flight Controller With Neo-6M GPS For Multicopters
- Invensense's 6 DoF Accelerometer/Gyro MPU-6000.
- Barometric pressure sensor upgraded to MS5611-01BA03,
- Atmel's ATMEGA2560 and ATMEGA32U-2 chips
- Neo-6M GPS
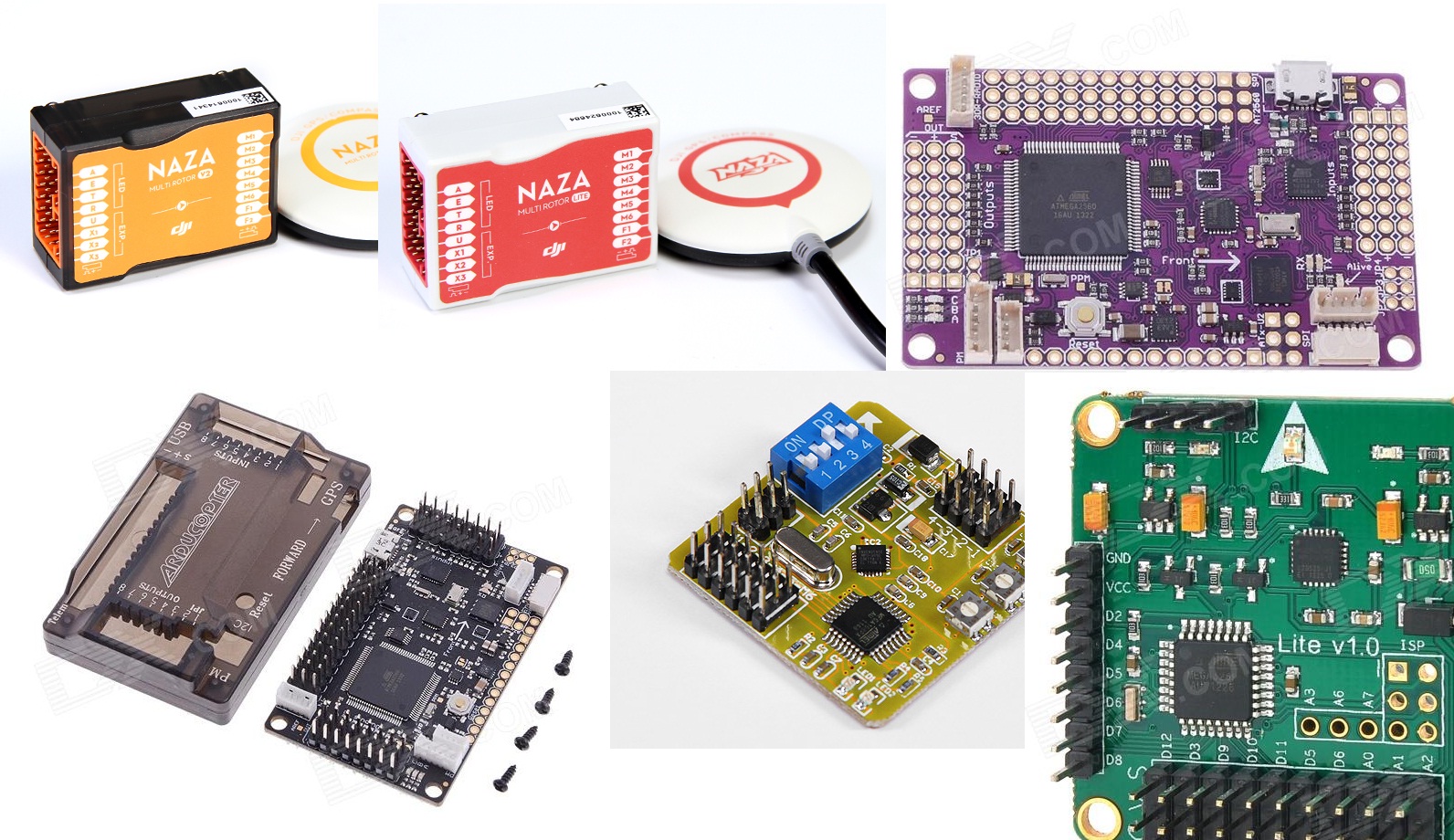
-DJI Naza-M Lite Multi-Rotor Flight Controller GPS Combo
Naza-M Lite Main Controller
DJI GPS/Compass Module
Supported ESC output: 400Hz refresh frequency
Max Yaw Angular Velocity: 200°/s

-DJI Naza-M V2 Multi-Rotor Flight Controller GPS Combo
Naza-M V2 Main Controller
DJI GPS/Compass Module
Naza PMU V2
Naza Independant LED Module
USB data cable

-DJI A2 Multi-Rotor stabilization controller

-WooKong-M is a flight control

-Ace Waypoint is based on DJI

-Naza-H

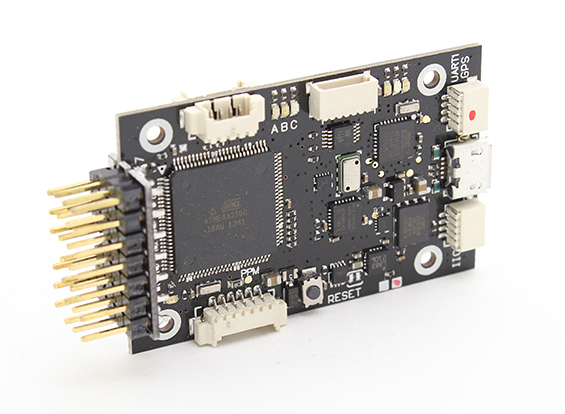
-AfroFlight Naze32 Acro AbuseMark FunFly Controller
-HKPilot32 Autonomous Vehicle 32Bit Control Set

-Pixhawk

-Quanum QFX Plus GPS Multi-Rotor Flight Controller

-Jiyi P2 Flight Controller

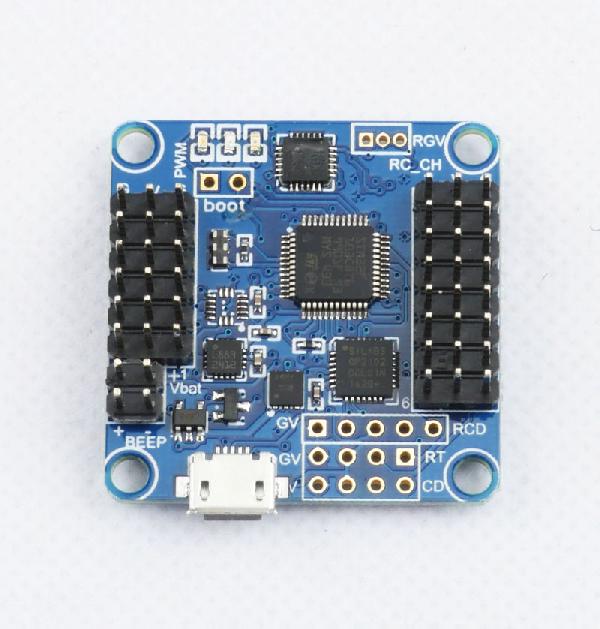
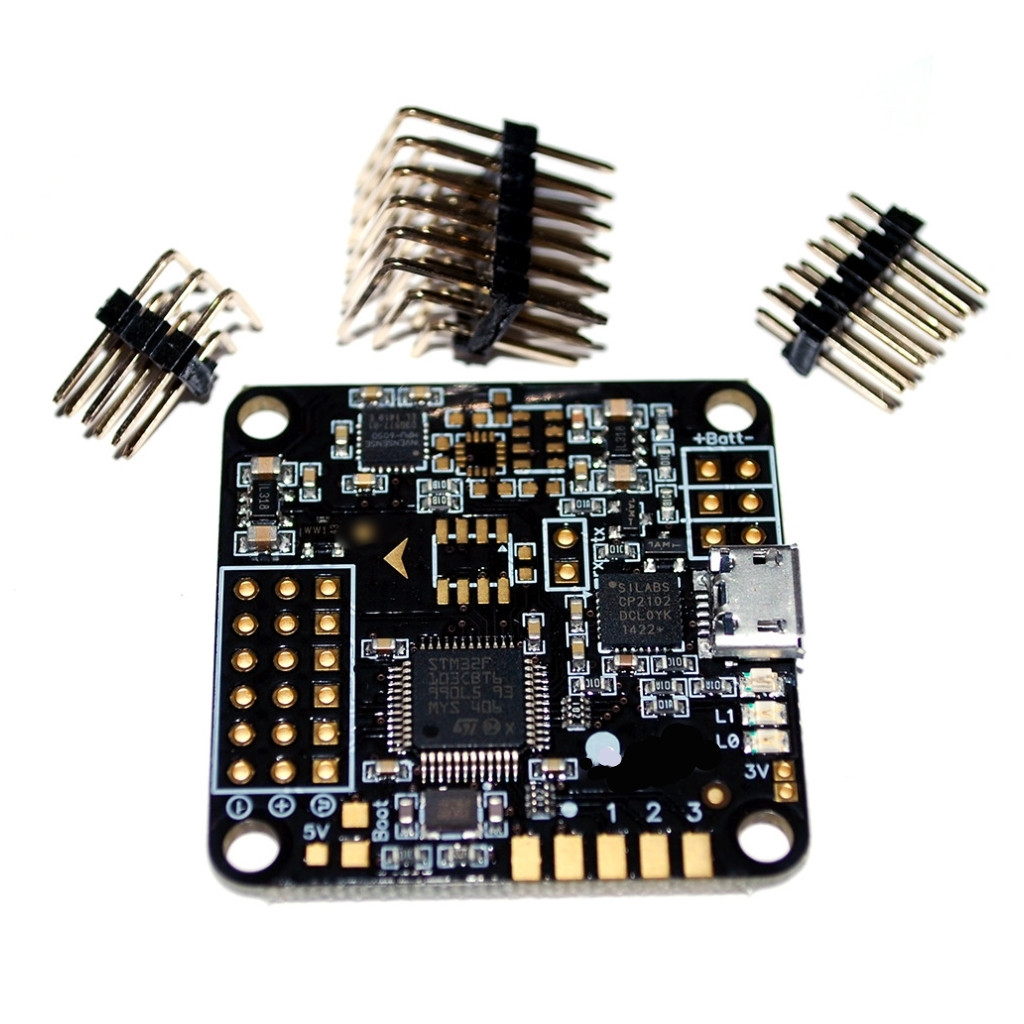
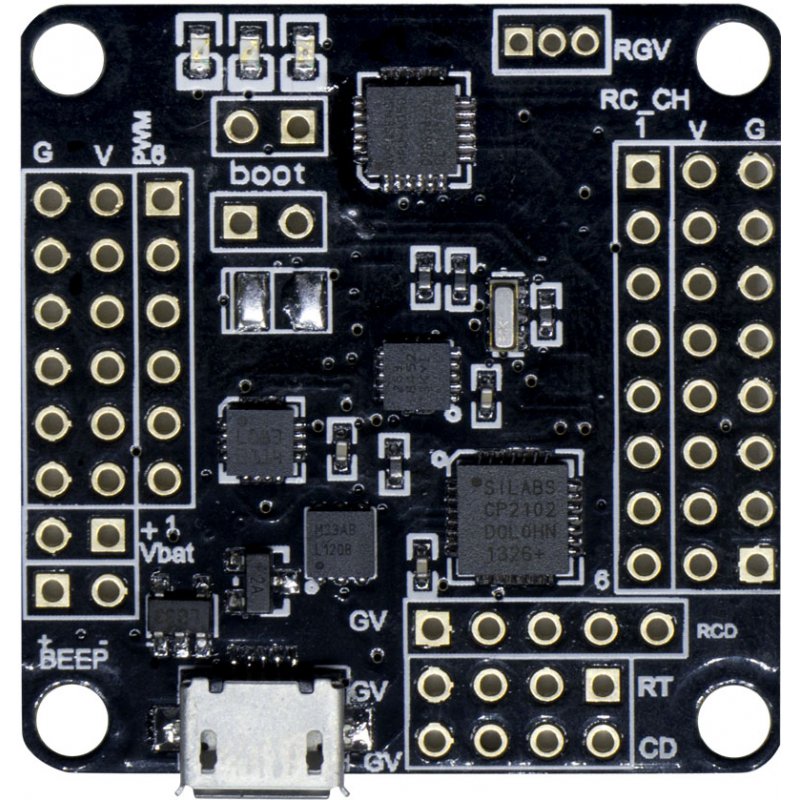
-Flip32 flight controller
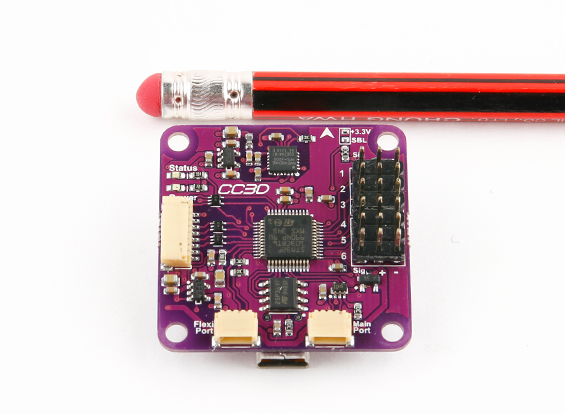
-OpenPilot CC3D Flight Controller
-Naze32 Baseflight GUI
-Cleanflight Flight Controller - 32bit MultiWii
-Flyduino MultiWii32
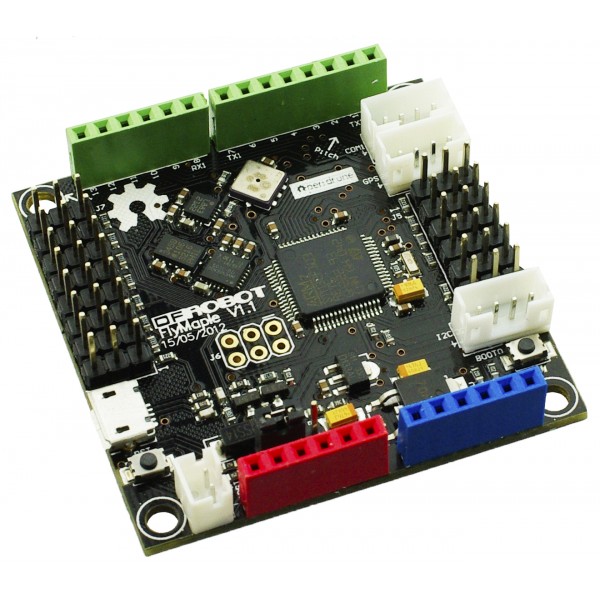
-Flymaple-A flight controller with 10 DOF IMU 32 bit
- OpenFC: a new Autoquad software compatible Open-Hardware Flight-Controller
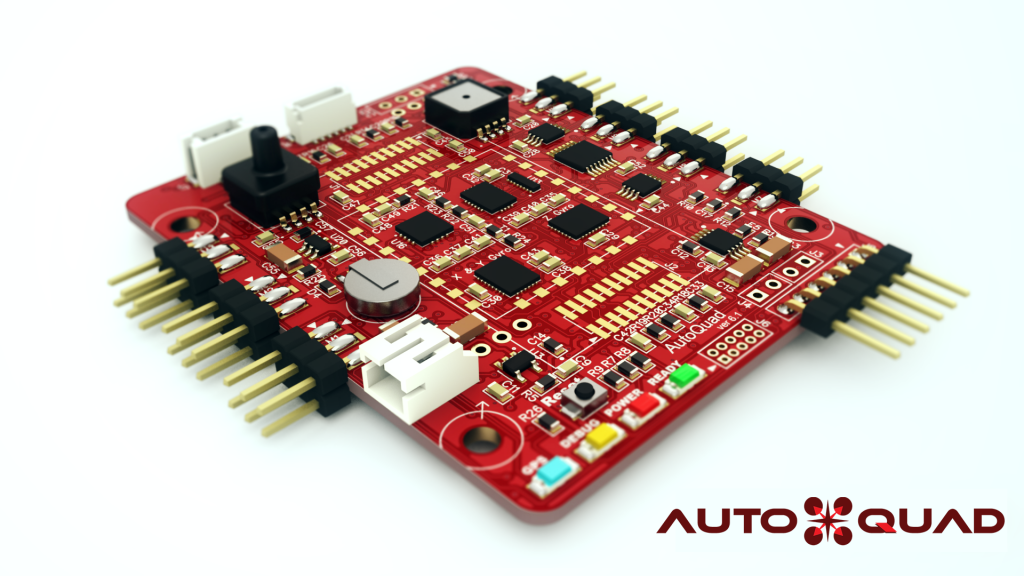
- AutoQuad flight controller
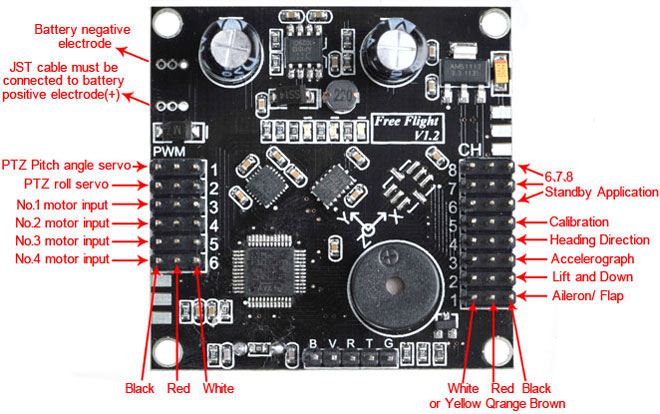
-Free Flight FF Auto Balance Controller
-FY-30A firmware for multi-rotor V1.20

-Rabbit Flight Controller & additional board
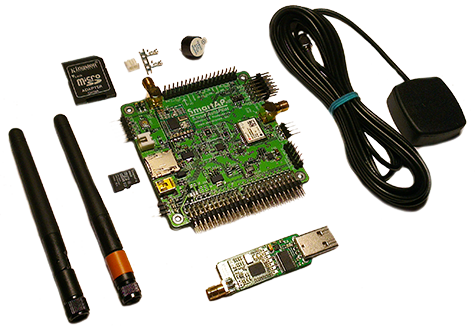
-SmartAP 3.0 PRO Flight Control System
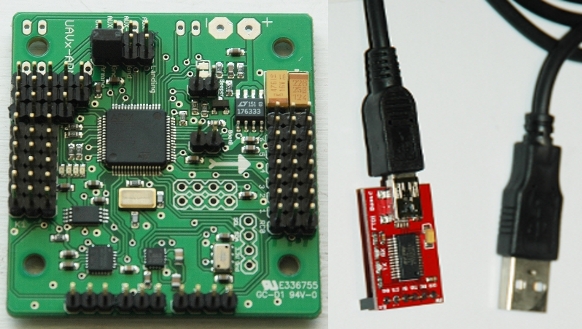
-UAVX-ARM32 Full Sensors
-Tarot ZYX-S2 3-Axis Gyro Flybarless System w/USB Program Adapter

-APS-M Multicopter Control Unit

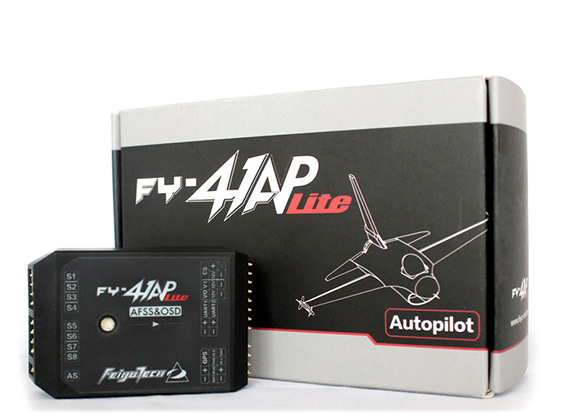
-FY-41AP-Lite Flight Stabilization Controller & OSD Combo
-FY-40A Fixed Wing Flight Stabilization Controller (w/Self-Leveling)

-Turnigy T1000FC Auto Pilot System With GPS and Return To Home

Zero UAV YS-X6 Autopilot system for multirotors Android/Apple IOS and PC system.

- DJI N3-AG Solution Package V2.0
400Hz frequency, DJI Intelligent ESC with feedback
Hovering Accuracy Vertical: ±0.5m Horizontal: ±1.5m
Maximum Wind Resistance <10m/s
Max Yaw Angular Velocity 150 deg/s
Max Pitch Angle 45°
Max Ascending Velocity 5m/s
Quadcopter: I4,X4; Hexacopter: I6,X6,Y6,IY6 Octocopter: X8,I8,V8
Power Consumption Normal 3.3W Max 4.8W
-Pixhawk 2.1 Cube
Processor
32-bit ARM Cortex M4 core with FPU
168 Mhz/256 KB RAM/2 MB Flash
32-bit failsafe co-processor
Sensors
Three redundant IMUs (accels, gyros and compass)
InvenSense MPU9250, ICM20948 and/or ICM20648 as first and third IMU (accel and gyro)
ST Micro L3GD20+LSM303D or InvenSense ICM2076xx as backup IMU (accel and gyro)
Two redundant MS5611 barometers
- DJI A3 Pro Flight Controller
Hovering Accuracy Vertical: 0.5m Horizontal: 1.5m
D-RTK GNSS Vertical: 0.02m + 1ppm Horizontal: 0.01m + 1ppm
Power Consumption A3 Pro: Max. 16W A3: Max. 8W
Supported Multi-rotor Quadcopter: I4,X4;
Hexacopter: I6,X6,Y6,IY6
Octocopter: X8,I8,V8
Supported ESC 400Hz frequency
Recommended Battery 3S to 12S LiPo
Assistant Software System Requirement Windows 7 /8 /10 (32 or 64 bit)
Mac OS Recommended Radio Lightbridge 2, S-BUS or D-BUS
Other DJI Products Supported Ronin-MX, S900, S1000, S1000+,iOSD, D-RTK, DATALINK PRO etc. Operating Temperature -10°C to +45°C
ยังไม่หมดนะครับ








